























|
Integrierte Abstufbarkeit des EOD-Roboter-Gerät-40º/kletternde Treppe
Produktdetails:
| Herkunftsort: | CHINA |
| Markenname: | HEWEI |
| Zertifizierung: | YES |
| Modellnummer: | HW-400 |
Zahlung und Versand AGB:
| Min Bestellmenge: | 1 Satz |
|---|---|
| Preis: | USD/Set FOB shenzhen |
| Verpackung Informationen: | Kartonkasten |
| Lieferzeit: | 20 Werktage |
| Zahlungsbedingungen: | T/T |
| Versorgungsmaterial-Fähigkeit: | 10 Sätze pro Monat |
|
Detailinformationen |
|||
| Farbe: | Schwarz | Gewicht: | ≤37kg (einschließlich zwei Batterien) |
|---|---|---|---|
| Vertikales Springen über Höhe: | 400mm | Kletternde Treppe: | 40º |
| Flache Ausdehnung des Roboterarmes: | ≥6kg | Maximale Spannkraft: | ≥300N |
| Hervorheben: | Integrierter EOD-Roboter,Eod-Robotergerät,Abstufbarkeit 40º EOD-Roboter |
||
Produkt-Beschreibung
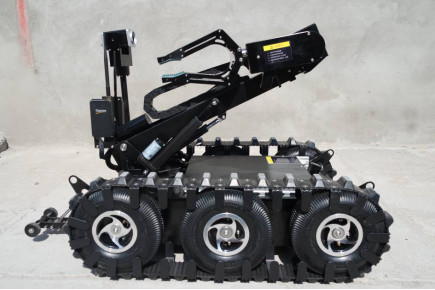
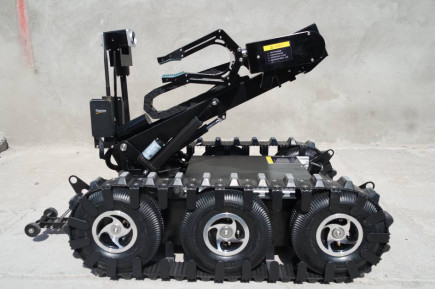
Integrierte Abstufbarkeit des EOD-Roboter-Gerät-40º/kletternde Treppe
Eod-Roboter
Beschreibung
Eod-Roboter besteht Körper und aus Kontrollsystem des mobilen Roboters.
Körper des mobilen Roboters besteht Kasten, elektrischen Motor, Ansteuersystem, Parallelgreifer, Wiegenkopf, Überwachungsanlage, Beleuchtung, Sprengstoffunterbrecherbasis, Akku, Zugöse, etc.
Parallelgreifer besteht großen Arm, teleskopischen Arm, Handfeuerwaffe und Manipulator. Er ist auf Nierenbecken installiert und sein Durchmesser ist 220mm. Doppelter elektrischer Aufenthaltspfosten und doppelter luftbetriebener Aufenthaltspfosten sind auf Parallelgreifer installiert. Wiegenkopf ist zusammenklappbar. Luftbetriebener Aufenthaltspfosten, -kamera und -antenne sind auf Wiegenkopf installiert. Überwachungsanlage besteht Kamera, Monitor, Antenne, ETC…. Ein Satz LED-Lichter wird an der Front des Körpers und auf der Rückseite des Körpers angebracht. Dieses System wird durch DC24V-Bleisäureakku angetrieben.
Kontrollsystem besteht Mittelkontrollsystem, Schaltkasten, etc.
![]()
Technischer Parameter
| Roboter-Körper | |
| Materialien | Aluminiumlegierung des Flugzeug-Grades, Präzisionsbearbeitung |
| Maße | L*W*H: 910 * 650 * 500 Millimeter |
| Gewicht | 90kg (ohne Zusätze, Paket und Schaltkasten) |
| Batterie | DC24V-Bleisäureakku |
| Arbeitszeit | ≥ 5 Stunden |
| Höchstgeschwindigkeit | ≥1.5m/s |
| Belastbarkeit | Wenn es 140KG lädt, kann sich es normalerweise bewegen (tatsächliches Maß). |
| Aufzug-Fähigkeit | Es kann sich mit dem Festklemmen von Gewichten 40K bewegen und wird nicht fallen (tatsächliches Maß). |
| Grad-Fähigkeit | Es kann die Steigung von 45° oben klettern und auf der Steigung ständig stoppen. |
| Kletternde Treppen-Fähigkeit | Mit Zugkraft-freier Vorlage kann es auf und ab die Treppe der 160mm Schritthöhe und der Steigung 45°angle klettern. |
| Drehenfähigkeit | Im horizontalen Zementboden oder in der Asphaltdecke kann der Roboter rechtsläufiges oder 360º drehen entgegen dem Uhrzeigersinn. |
| Begrenzte Durchgangs-Breite | ≤700mm |
| Über-Hindernis Kapazität | Es kann das Hindernis von 320mm Höhe kreuzen. |
| Max. Parallelgreifer-Verbreitung | 1650mm |
| Greifer Manipulator-der maximalen Expansions-Strecke | 250mm |
| Bewaffnen Sie Erweiterung, wenn heraus ausdehnen Sie und zurück zeichnen Sie | 500mm |
| Steuerabstand | Drahtlose Steuerung: ≥150m (Bereich des Sichtbaren); Drahtsteuerung: 100m (optionale 200m); |
| Vorwärtskamera | Färben Sie Infrarotinduktion |
| Rückwärtige Kamera | Färben Sie Infrarotinduktion |
| Wiegen-Kopf-verschiedene fokale Kamera | Färben Sie Infrarotinduktion |
| Manipulator-Greifer-Kamera | Färben Sie Infrarotinduktion |
| Flutlicht | Flutlicht zwei Gruppe LED (eine Gruppe auf der Front und der Rückseite) |
| Steueranschluß | |
| Kasten | Tragbar, wasserdicht, staubdicht, hochfest |
| Größe | ≤ L 460 * *H W 370 260 Millimeter |
| Gewicht | ≤ 10kg |
| Bildschirm | 12 Zoll HB LCD, breiter Betrachtenwinkel, klares Bild im Freien |
| Operation | Hochwertiger Rockergriff, menschlicher Programmschnittstellenentwurf, einfache Beobachtung und bequeme Bedienung |
| Grafische Darstellung | Es kann 4 Videosignale gleichzeitig überwachen oder eins von 4 Videosignalen separat verstärken |
| Batterie | Wieder aufladbare 24V Lithium-Batterie, Arbeitszeit ≥ 5,1 Stunden, wenn Sie völlig aufgeladen werden. |
Firmeneinleitung
Im Jahre 2008 wurde Technologie Co., Ltd. Pekings Hewei Yongtai in Beijing.Focus auf der Entwicklung hergestellt und Operation der speziellen Schutzausrüstung, dienen hauptsächlich das Gesetz der öffentlichen Sicherheit, die bewaffnete Polizei, das Militär, die Gewohnheiten und andere nationale Sicherheitsabteilungen.
Im Jahre 2010 wurde die Polizei-Ausrüstung Jiangsus Hewei, die Co. herstellt, Ltd. in Guannan.Covering ein Bereich von 9000 Quadratmetern der Werkstatt hergestellt und Bürogebäude, zielt sie darauf ab, eine erstklassige spezielle Schutzausrüstungsforschung und entwicklung Basis in China zu errichten.
Im Jahre 2015 wurden eine Militärpolizei Reserch und Entwicklungszentrum in Shenzhen.Focus auf der Entwicklung der speziellen Schutzausrüstung, hat entwickelt mehr als 200 Arten Berufsschutzausrüstung gegründet.
Jiangsu-Fabrik
![]()
![]()
Shenzhen-Forschungszentrum
![]()
![]()
Überseeausstellungen
![]()
![]()
Zertifikate
![]()
![]()
![]()
Personal-Foto
Personal von Jiangsu-Fabrik
![]()
Personal von den Hauptsitzen
![]()
Personal vom Shenzhen-Forschungszentrum
![]()